


Küchenchef Kochroboter Kochmaschine geschalteter Reluktanzmotor
Motorparameter
| Betriebsspannung | DC300V |
| Nennstrom | 2,8 ± 10 % A |
| Maximaler Strom | 5,4A |
| Startspannung | DC23V ~ 25V |
| Nennleistung | 700 ± 10 % W |
| Nenngeschwindigkeit | 35000 ± 10 % U/min |
| Leerlaufleistung | <100W |
| Anzahl der Stangen | 2 |
| Drehmoment | 0,2NM |
| Wirksamkeit | 80 % ± 10 % |
| Kommutierung | Axialer Uhrzeigersinn |
| Lärm | 96 dB MAX, <30 cm |
| Gewicht | 1,68 kg |
| Lager | 2 Kugellager |
| Kontrolle | Hallsensor |
| Installieren | Flanschmontage |
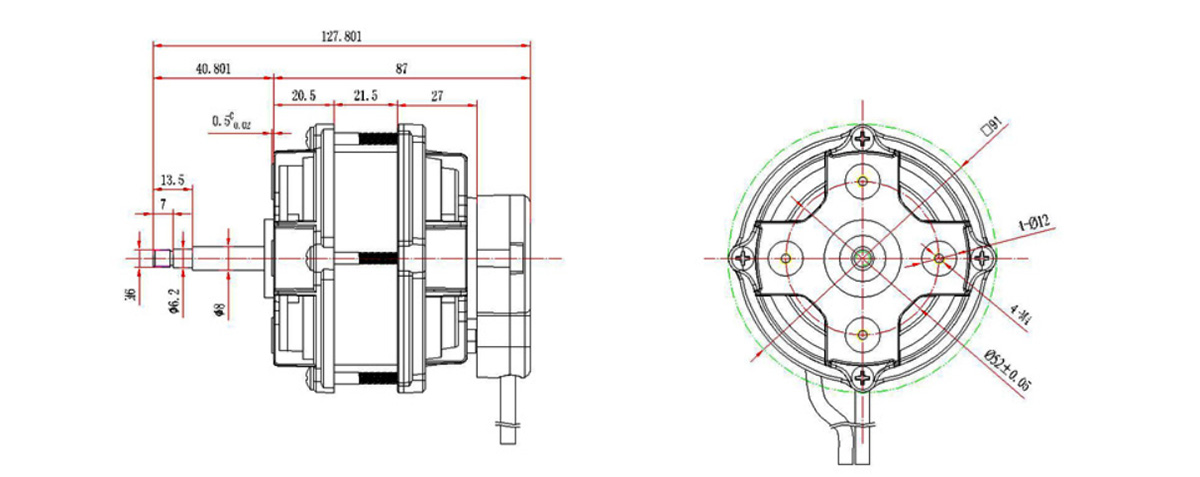
Motorstruktur
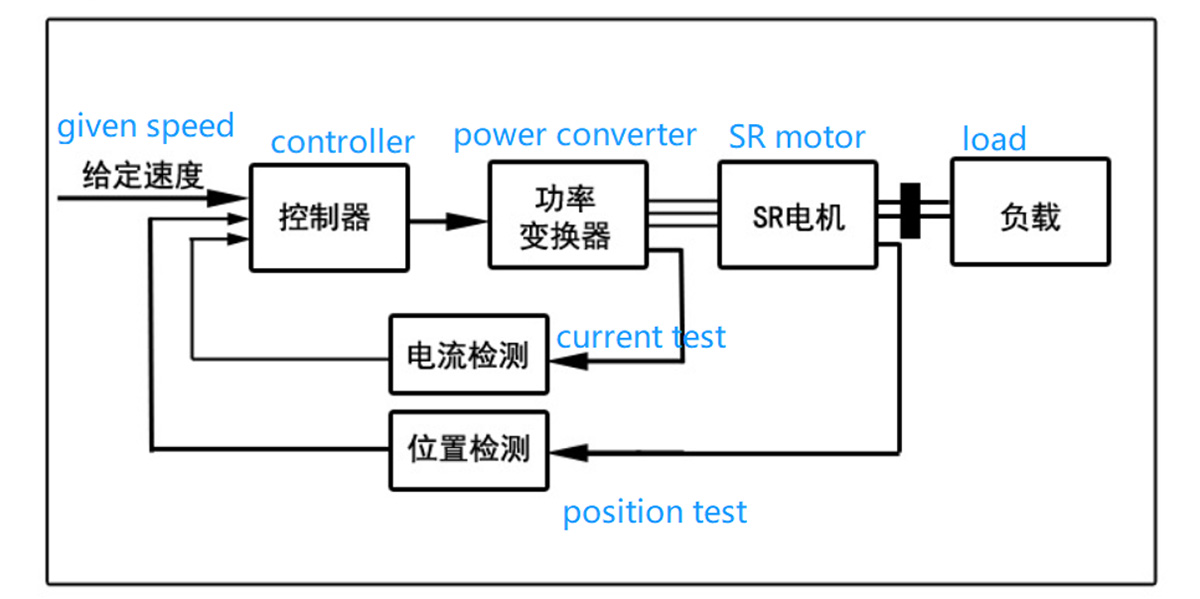
1. Die Zusammensetzung des geschalteten Reluktanzmotor-Antriebssystems
Das Antriebssystem mit geschaltetem Reluktanzmotor (SRD) besteht hauptsächlich aus einem geschalteten Reluktanzmotor, einem Leistungswandler, einem Controller und einem Detektor.
2.Geschalteter Reluktanzmotor
SR-Motoren können in einphasigen, zweiphasigen, dreiphasigen, vierphasigen und mehrphasigen Strukturen mit unterschiedlichen Phasenzahlen konstruiert werden, und es gibt Einzelzahnstrukturen pro Pol und Mehrzahnstrukturen pro Pol, axiale Luft Luftspalt, radialer Luftspalt und axialer Luftspalt.SR-Motoren mit weniger als drei Phasen verfügen über eine radiale Hybrid-Luftspaltstruktur mit Innenrotor- und Außenrotorstruktur und verfügen im Allgemeinen nicht über die Fähigkeit zum Selbststart.Eine große Anzahl von Phasen ist vorteilhaft, um Drehmomentschwankungen zu reduzieren, führt jedoch zu einer komplexen Struktur, vielen Hauptschaltvorrichtungen und erhöhten Kosten.Gegenwärtig sind die zweiphasige 6/4-Pol-Struktur und die vierphasige 8/6-Ebenen-Struktur weit verbreitet.
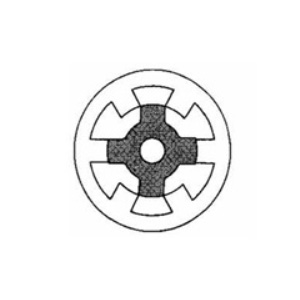
Regelmäßige Struktur 3-phasig
6/4 polarer SR-Motor
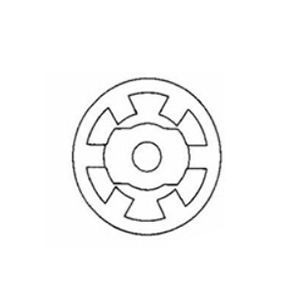
3-phasig 6/2
polarer SR-Motor
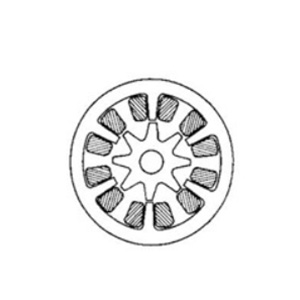
3-phasig 6/8
polarer SR-Motor

3-phasig 12/8
polarer SR-Motor
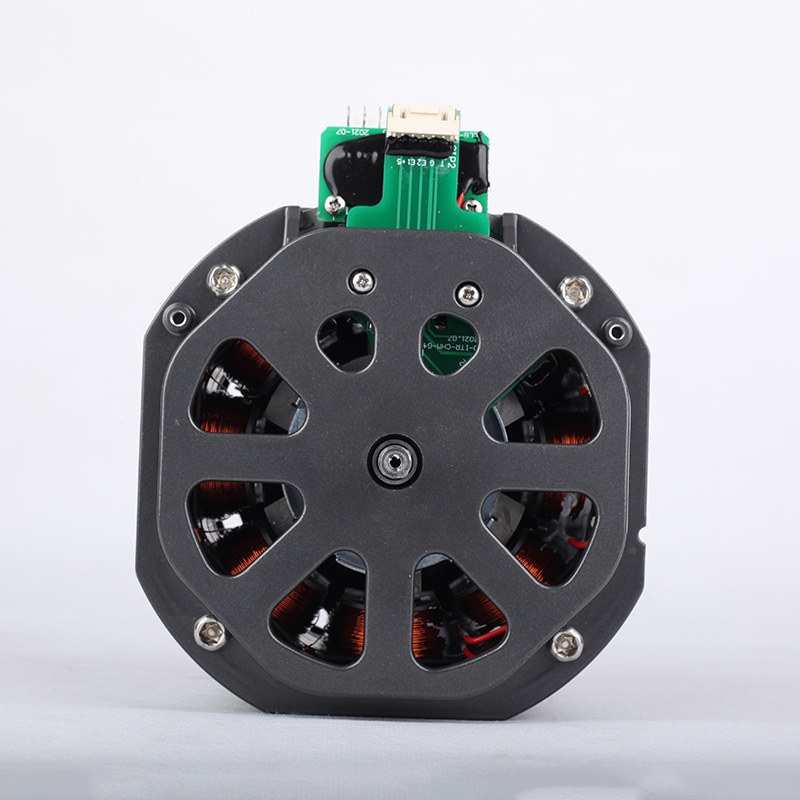
3. Physischer Schaltplan von Motor und Treiber
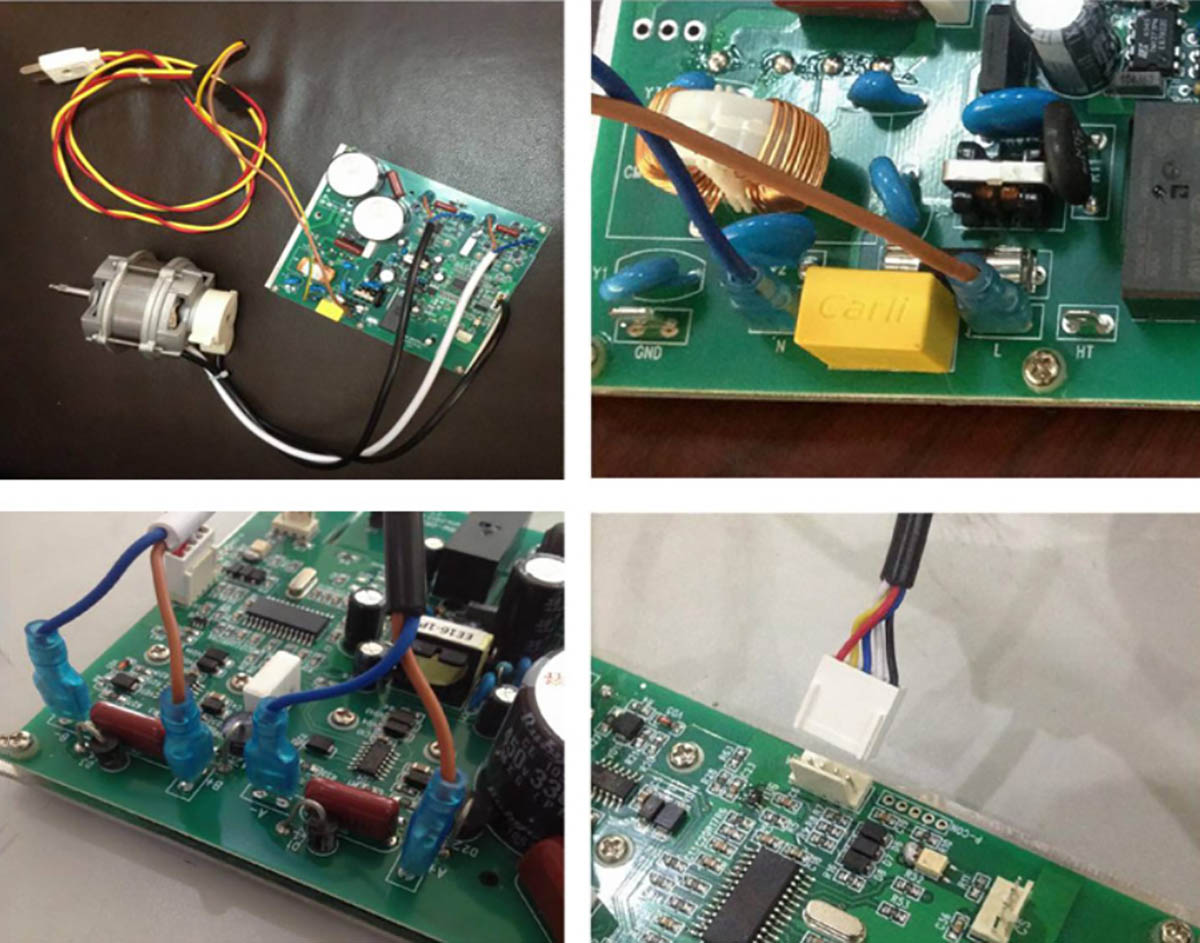
Produktfoto


Verkabelung der Motorphasen
Schwarz (Braun /A+ Blau /A-), Weiß (Braun /A+ Blau /A-), Kabellänge L=380 ± 50 mm
Hall-Kabelverkabelung:
Rot (+5V), Schwarz (GND), Gelb (SA), Blau (SB), Weiß (SC), Leitungslänge L= Leitungslänge L=380 ± 50mm
Lagerung: 5 ℃ ~40 ℃, Luftfeuchtigkeit <90 %
Isolationsklasse: F
Rissfreie Spule dreht sich 3 Minuten lang bei 130 % der Nennspannung.
Lebensdauer: 2000 Stunden unter normalen Arbeitsbedingungen.
Die axiale Verschiebung sollte bei laufendem Motor weniger als 0,02 mm betragen.
Motoreigenschaften
1.Hoher Systemwirkungsgrad: In seinem breiten Geschwindigkeitsregelungsbereich ist der Gesamtwirkungsgrad mindestens 10 % höher als bei anderen Geschwindigkeitsregelungssystemen, und der hohe Wirkungsgrad ist bei niedriger Geschwindigkeit und Nicht-Nennlast deutlicher zu erkennen.
2.Breiter Drehzahlregelungsbereich, Langzeitbetrieb bei niedriger Drehzahl: Im Bereich von Null bis Höchstdrehzahl kann über längere Zeit unter Last gearbeitet werden, und der Temperaturanstieg von Motor und Regler ist geringer als der der Nennlast.
3.Hohes Anlaufdrehmoment, niedriger Anlaufstrom: Wenn das Anlaufdrehmoment 150 % des Nenndrehmoments erreicht, beträgt der Anlaufstrom nur noch 30 % des Nennstroms.
4. Es kann häufig starten und stoppen und zwischen Vorwärts- und Rückwärtsdrehung wechseln: Es kann häufig starten und stoppen und häufig zwischen Vorwärts- und Rückwärtsdrehung wechseln.Wenn eine Bremseinheit vorhanden ist und die Bremsleistung den Zeitanforderungen entspricht, können die Start-Stopp- und Vorwärts-Rückwärts-Schaltungen mehr als 1.000 Mal pro Stunde erfolgen.
5. Starke Überlastfähigkeit: Wenn die Last für kurze Zeit viel größer als die Nennlast ist, sinkt die Drehzahl, die maximale Ausgangsleistung bleibt erhalten und es tritt kein Überstromphänomen auf.Wenn die Belastung wieder normal ist, kehrt die Geschwindigkeit zur eingestellten Geschwindigkeit zurück.
6.Die mechanische Festigkeit und Zuverlässigkeit sind höher als bei anderen Motortypen.Der Rotor hat keine Permanentmagnete und kann einen höheren zulässigen Temperaturanstieg aufweisen.
Anwendung
Ventilator und Kochmaschine
Produktkategorien
-

24~72V DC Typ 1t gerade Gabelwaage schweres E...
-

260 Motor Permanentmagnet-Synchronmotor-Ka...
-

30KW 144V AC Elektromotor für Elektroauto ...
-

3 kW 48 V elektrischer Golfwagen-Gleichstrommotor mit Achsd ...
-

2,2-kW-Wechselstrommotor für elektrischen LKW-Motor
-

Wasserversorgung mit konstantem Druck und HVAC SRD





