Elektrofahrzeuge bestehen hauptsächlich aus drei Teilen: Motorantriebssystem, Batteriesystem und Fahrzeugsteuerungssystem.Das Motorantriebssystem ist der Teil, der elektrische Energie direkt in mechanische Energie umwandelt, was die Leistungsindikatoren von Elektrofahrzeugen bestimmt.Daher ist die Auswahl des Antriebsmotors besonders wichtig.
Auch im Umfeld des Umweltschutzes haben sich Elektrofahrzeuge in den letzten Jahren zu einem Forschungsschwerpunkt entwickelt.Elektrofahrzeuge können im Stadtverkehr null oder sehr niedrige Emissionen erreichen und haben enorme Vorteile im Bereich Umweltschutz.Alle Länder arbeiten intensiv an der Entwicklung von Elektrofahrzeugen.Elektrofahrzeuge bestehen hauptsächlich aus drei Teilen: Motorantriebssystem, Batteriesystem und Fahrzeugsteuerungssystem.Das Motorantriebssystem ist der Teil, der elektrische Energie direkt in mechanische Energie umwandelt, was die Leistungsindikatoren von Elektrofahrzeugen bestimmt.Daher ist die Auswahl des Antriebsmotors besonders wichtig.
1. Anforderungen an Elektrofahrzeuge an Antriebsmotoren
Derzeit werden bei der Bewertung der Leistung von Elektrofahrzeugen hauptsächlich die folgenden drei Leistungsindikatoren berücksichtigt:
(1) Maximale Kilometerleistung (km): die maximale Kilometerleistung des Elektrofahrzeugs nach vollständiger Aufladung der Batterie;
(2) Beschleunigungsfähigkeit(en): die Mindestzeit, die ein Elektrofahrzeug benötigt, um aus dem Stillstand auf eine bestimmte Geschwindigkeit zu beschleunigen;
(3) Höchstgeschwindigkeit (km/h): die Höchstgeschwindigkeit, die ein Elektrofahrzeug erreichen kann.
Motoren, die für die Fahreigenschaften von Elektrofahrzeugen ausgelegt sind, stellen im Vergleich zu Industriemotoren besondere Leistungsanforderungen:
(1) Der Antriebsmotor eines Elektrofahrzeugs erfordert normalerweise hohe dynamische Leistungsanforderungen für häufiges Starten/Stoppen, Beschleunigen/Verzögern und Drehmomentsteuerung;
(2) Um das Gewicht des gesamten Fahrzeugs zu reduzieren, wird in der Regel auf das Mehrganggetriebe verzichtet, was erfordert, dass der Motor bei niedriger Geschwindigkeit oder beim Bergauffahren ein höheres Drehmoment liefern kann und in der Regel 4-5 mal standhalten kann die Überlastung;
(3) Der Geschwindigkeitsregelbereich muss so groß wie möglich sein und gleichzeitig muss eine hohe Betriebseffizienz innerhalb des gesamten Geschwindigkeitsregelbereichs aufrechterhalten werden.
(4) Der Motor ist so konzipiert, dass er eine möglichst hohe Nenndrehzahl aufweist, und gleichzeitig wird so weit wie möglich ein Gehäuse aus Aluminiumlegierung verwendet.Der Hochgeschwindigkeitsmotor ist klein, was zur Gewichtsreduzierung von Elektrofahrzeugen beiträgt.
(5) Elektrofahrzeuge sollen über eine optimale Energieausnutzung verfügen und über die Funktion der Bremsenergierückgewinnung verfügen.Die durch regeneratives Bremsen zurückgewonnene Energie sollte im Allgemeinen 10–20 % der Gesamtenergie ausmachen;
(6) Die Arbeitsumgebung des in Elektrofahrzeugen verwendeten Motors ist komplexer und rauer, was eine gute Zuverlässigkeit und Anpassungsfähigkeit des Motors an die Umgebung erfordert und gleichzeitig sicherstellt, dass die Kosten der Motorproduktion nicht zu hoch sein dürfen.
2. Mehrere häufig verwendete Antriebsmotoren
2.1 Gleichstrommotor
In der frühen Phase der Entwicklung von Elektrofahrzeugen verwendeten die meisten Elektrofahrzeuge Gleichstrommotoren als Antriebsmotoren.Diese Art von Motortechnologie ist relativ ausgereift, mit einfachen Steuerungsmethoden und hervorragender Geschwindigkeitsregulierung.Früher war es das am weitesten verbreitete Gerät im Bereich der Geschwindigkeitsregelungsmotoren..Aufgrund der komplexen mechanischen Struktur des Gleichstrommotors, wie z. B. Bürsten und mechanische Kommutatoren, sind jedoch seine momentane Überlastfähigkeit und die weitere Erhöhung der Motordrehzahl begrenzt, und im Falle einer Langzeitarbeit ist die mechanische Struktur von Es entstehen Verluste am Motor und die Wartungskosten erhöhen sich.Darüber hinaus führt der Funkenflug der Bürsten bei laufendem Motor zu einer Erwärmung des Rotors, verschwendet Energie, erschwert die Wärmeableitung und verursacht hochfrequente elektromagnetische Störungen, die die Leistung des Fahrzeugs beeinträchtigen.Aufgrund der oben genannten Nachteile von Gleichstrommotoren sind Gleichstrommotoren bei aktuellen Elektrofahrzeugen grundsätzlich überflüssig.
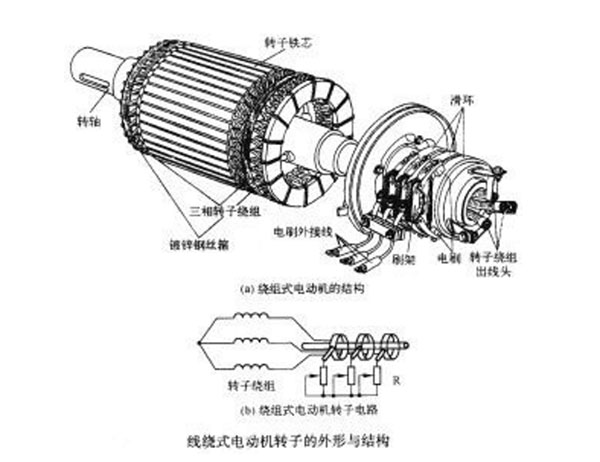
2.2 AC-Asynchronmotor
Wechselstrom-Asynchronmotoren sind ein Motortyp, der in der Industrie weit verbreitet ist.Es zeichnet sich dadurch aus, dass der Stator und der Rotor aus Siliziumstahlblechen laminiert sind.Beide Enden sind mit Aluminiumabdeckungen verpackt., zuverlässiger und langlebiger Betrieb, einfache Wartung.Im Vergleich zum Gleichstrommotor gleicher Leistung ist der Wechselstrom-Asynchronmotor effizienter und die Masse ist etwa um die Hälfte geringer.Wenn die Steuermethode der Vektorsteuerung übernommen wird, können eine Steuerbarkeit und ein breiterer Geschwindigkeitsregelbereich erreicht werden, die mit denen des Gleichstrommotors vergleichbar sind.Aufgrund der Vorteile eines hohen Wirkungsgrads, einer hohen spezifischen Leistung und der Eignung für den Hochgeschwindigkeitsbetrieb sind Wechselstrom-Asynchronmotoren die am häufigsten verwendeten Motoren in Hochleistungs-Elektrofahrzeugen.Gegenwärtig werden Wechselstrom-Asynchronmotoren in großem Maßstab hergestellt, und es stehen verschiedene Arten ausgereifter Produkte zur Auswahl.Bei Hochgeschwindigkeitsbetrieb wird der Rotor des Motors jedoch stark erhitzt und der Motor muss während des Betriebs gekühlt werden.Gleichzeitig ist das Antriebs- und Steuerungssystem des Asynchronmotors sehr kompliziert und auch die Kosten für das Motorgehäuse sind hoch.Im Vergleich zum Permanentmagnetmotor und dem geschalteten Reluktanzmotor sind der Wirkungsgrad und die Leistungsdichte von Asynchronmotoren gering, was der Verbesserung der maximalen Kilometerleistung von Elektrofahrzeugen nicht förderlich ist.
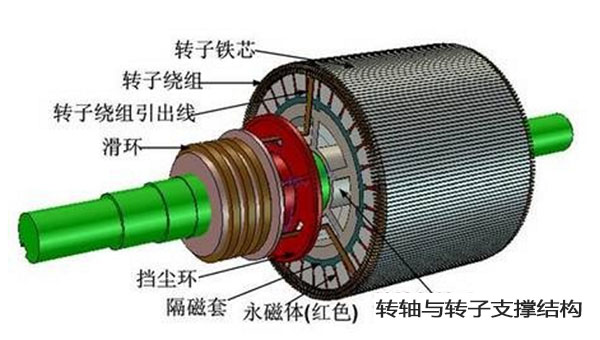
2.3 Permanentmagnetmotor
Permanentmagnetmotoren können je nach den unterschiedlichen Stromwellenformen der Statorwicklungen in zwei Typen unterteilt werden: Der eine ist ein bürstenloser Gleichstrommotor, der einen rechteckigen Impulswellenstrom hat;der andere ist ein Permanentmagnet-Synchronmotor, der einen Sinuswellenstrom hat.Die beiden Motortypen sind im Aufbau und Funktionsprinzip grundsätzlich gleich.Die Rotoren sind Permanentmagnete, was den durch Erregung verursachten Verlust reduziert.Der Stator ist mit Wicklungen ausgestattet, um durch Wechselstrom Drehmoment zu erzeugen, sodass die Kühlung relativ einfach ist.Da dieser Motortyp keine Bürsten und keine mechanische Kommutierungsstruktur installieren muss, werden während des Betriebs keine Kommutierungsfunken erzeugt, der Betrieb ist sicher und zuverlässig, die Wartung ist bequem und die Energienutzungsrate ist hoch.
Das Steuerungssystem des Permanentmagnetmotors ist einfacher als das Steuerungssystem des AC-Asynchronmotors.Aufgrund der Beschränkung des Permanentmagnet-Materialprozesses ist der Leistungsbereich des Permanentmagnetmotors jedoch klein und die maximale Leistung beträgt im Allgemeinen nur mehrere zehn Millionen, was den größten Nachteil des Permanentmagnetmotors darstellt.Gleichzeitig weist das Permanentmagnetmaterial am Rotor unter den Bedingungen hoher Temperatur, Vibration und Überstrom ein Phänomen des magnetischen Zerfalls auf, sodass der Permanentmagnetmotor unter relativ komplexen Arbeitsbedingungen anfällig für Schäden ist.Darüber hinaus ist der Preis für Permanentmagnetmaterialien hoch, sodass auch die Kosten für den gesamten Motor und sein Steuerungssystem hoch sind.
2.4 Geschalteter Reluktanzmotor
Als neuer Motortyp weist der geschaltete Reluktanzmotor im Vergleich zu anderen Antriebsmotortypen den einfachsten Aufbau auf.Sowohl der Stator als auch der Rotor sind doppelt ausgeprägte Strukturen aus gewöhnlichen Siliziumstahlblechen.Es gibt keine Struktur am Rotor.Der Stator ist mit einer einfachen konzentrierten Wicklung ausgestattet, die viele Vorteile bietet, wie z. B. einfache und solide Struktur, hohe Zuverlässigkeit, geringes Gewicht, niedrige Kosten, hohe Effizienz, geringer Temperaturanstieg und einfache Wartung.Darüber hinaus verfügt es über die hervorragenden Eigenschaften einer guten Steuerbarkeit des Gleichstrom-Geschwindigkeitsregelsystems, ist für raue Umgebungen geeignet und eignet sich sehr gut für den Einsatz als Antriebsmotor für Elektrofahrzeuge.

In Anbetracht der Tatsache, dass Antriebsmotoren für Elektrofahrzeuge, Gleichstrommotoren und Permanentmagnetmotoren eine schlechte Anpassungsfähigkeit in der Struktur und komplexe Arbeitsumgebung aufweisen und anfällig für mechanische und Entmagnetisierungsfehler sind, konzentriert sich dieser Artikel auf die Einführung von geschalteten Reluktanzmotoren und Wechselstrom-Asynchronmotoren.Im Vergleich zur Maschine bietet es in folgenden Aspekten offensichtliche Vorteile.
2.4.1 Der Aufbau des Motorkörpers
Der Aufbau des geschalteten Reluktanzmotors ist einfacher als der des Käfigläufer-Induktionsmotors.Sein herausragender Vorteil besteht darin, dass der Rotor keine Wicklung aufweist und nur aus gewöhnlichen Siliziumstahlblechen besteht.Der größte Teil der Verluste des gesamten Motors konzentriert sich auf die Statorwicklung, wodurch der Motor einfach herzustellen ist, eine gute Isolierung aufweist, leicht zu kühlen ist und hervorragende Wärmeableitungseigenschaften aufweist.Diese Motorstruktur kann die Größe und das Gewicht des Motors reduzieren und kann mit einem kleinen Volumen erreicht werden.größere Ausgangsleistung.Aufgrund der guten mechanischen Elastizität des Motorrotors können geschaltete Reluktanzmotoren für den Höchstgeschwindigkeitsbetrieb eingesetzt werden.
2.4.2 Motorantriebskreis
Der Phasenstrom des geschalteten Reluktanzmotor-Antriebssystems ist unidirektional und hat nichts mit der Drehmomentrichtung zu tun, und es kann nur ein Hauptschaltgerät verwendet werden, um den Vierquadranten-Betriebszustand des Motors zu erfüllen.Der Stromrichterkreis ist direkt in Reihe mit der Erregerwicklung des Motors geschaltet und jeder Phasenkreis liefert unabhängig Strom.Selbst wenn eine bestimmte Phasenwicklung oder die Steuerung des Motors ausfällt, muss nur der Betrieb der Phase gestoppt werden, ohne dass es zu größeren Auswirkungen kommt.Daher sind sowohl der Motorkörper als auch der Stromrichter sehr sicher und zuverlässig und eignen sich daher besser für den Einsatz in rauen Umgebungen als Asynchronmaschinen.
2.4.3 Leistungsaspekte des motorischen Systems
Geschaltete Reluktanzmotoren verfügen über viele Steuerparameter. Durch geeignete Steuerstrategien und Systemdesigns lassen sich die Anforderungen des Vierquadrantenbetriebs von Elektrofahrzeugen problemlos erfüllen und in Hochgeschwindigkeitsbetriebsbereichen eine hervorragende Bremsleistung aufrechterhalten.Geschaltete Reluktanzmotoren haben nicht nur einen hohen Wirkungsgrad, sondern behalten auch über einen weiten Bereich der Drehzahlregelung einen hohen Wirkungsgrad bei, der von anderen Arten von Motorantriebssystemen nicht erreicht wird.Diese Leistung eignet sich sehr gut für den Betrieb von Elektrofahrzeugen und trägt sehr dazu bei, die Reichweite von Elektrofahrzeugen zu verbessern.
3. Fazit
Der Schwerpunkt dieser Arbeit liegt darauf, die Vorteile eines geschalteten Reluktanzmotors als Antriebsmotor für Elektrofahrzeuge durch den Vergleich verschiedener häufig verwendeter Drehzahlregelungssysteme für Antriebsmotoren hervorzuheben, was einen Forschungsschwerpunkt bei der Entwicklung von Elektrofahrzeugen darstellt.Für diese Art von Spezialmotoren gibt es in der praktischen Anwendung noch viel Entwicklungspotenzial.Die Forscher müssen mehr Anstrengungen unternehmen, um theoretische Forschung durchzuführen, und gleichzeitig ist es notwendig, die Bedürfnisse des Marktes zu bündeln, um die Anwendung dieses Motortyps in der Praxis zu fördern.
Zeitpunkt der Veröffentlichung: 24. März 2022