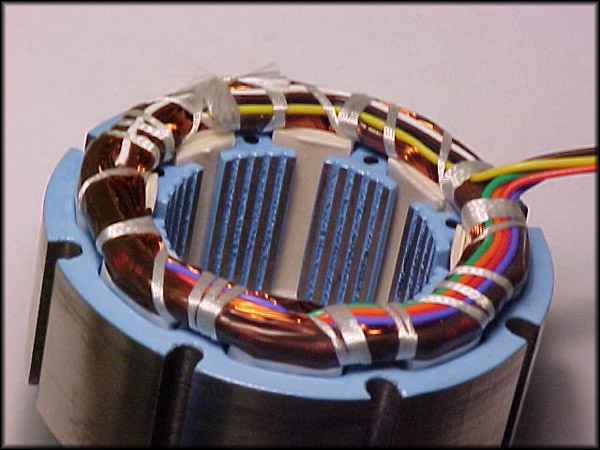
Schrittmotoren gehören heute zu den anspruchsvollsten Motoren.Sie zeichnen sich durch hochpräzise Schritte, hohe Auflösung und gleichmäßige Bewegungen aus.Schrittmotoren erfordern im Allgemeinen eine individuelle Anpassung, um in bestimmten Anwendungen eine optimale Leistung zu erzielen.Häufig sind kundenspezifische Designmerkmale Statorwicklungsmuster, Wellenkonfigurationen, kundenspezifische Gehäuse und Speziallager, die die Konstruktion und Herstellung von Schrittmotoren äußerst anspruchsvoll machen.Der Motor kann so gestaltet werden, dass er zur Anwendung passt. Anstatt die Anwendung zu zwingen, sich an den Motor anzupassen, kann ein flexibles Motordesign nur minimalen Platz beanspruchen.Mikroschrittmotoren sind schwierig zu entwerfen und herzustellen und können oft nicht mit größeren Motoren konkurrieren. Im Bereich der Automatisierung, insbesondere bei Anwendungen, die eine hohe Präzision erfordern, wie z. B. Mikropumpen, Flüssigkeitsdosierung und -steuerung, Quetschventile und optische Sensorsteuerung.Mikroschrittmotoren können sogar in elektrische Handwerkzeuge wie elektronische Pipetten integriert werden, wo die Integration von Hybridschrittmotoren bisher nicht möglich war.
Die Miniaturisierung ist in vielen Branchen ein anhaltendes Problem und war einer der Haupttrends der letzten Jahre, da Bewegungs- und Positionierungssysteme kleinere, leistungsstärkere Motoren für Produktion, Tests oder den täglichen Laborgebrauch erfordern.Die Automobilindustrie entwickelt und baut seit langem kleine Schrittmotoren, und Motoren, die klein genug sind, um in vielen Anwendungen zu existieren, gibt es immer noch nicht.Wenn Motoren klein genug sind, mangelt es ihnen an den für die Anwendung erforderlichen Spezifikationen, wie z. B. ausreichend Drehmoment oder Drehzahl, um auf dem Markt konkurrenzfähig zu sein.Die traurige Option besteht darin, einen Schrittmotor mit großem Rahmen zu verwenden und alle anderen Komponenten um ihn herum zurückzuziehen, oft über spezielle Halterungen und die Montage zusätzlicher Hardware.Die Bewegungssteuerung in diesem kleinen Bereich ist äußerst anspruchsvoll und zwingt die Ingenieure dazu, Kompromisse bei der räumlichen Struktur des Geräts einzugehen.
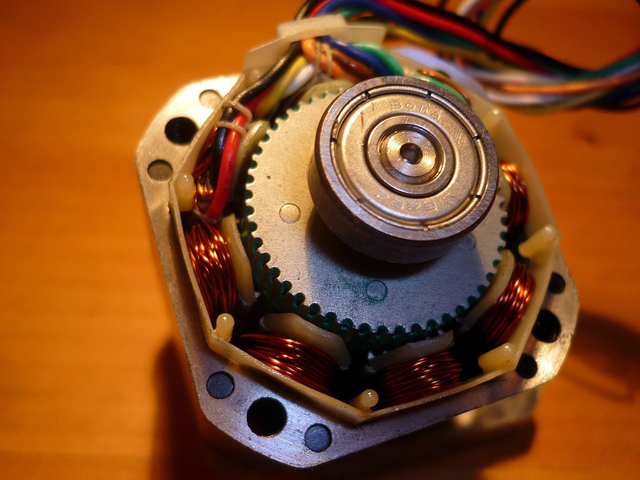
Standardmäßige bürstenlose Gleichstrommotoren sind strukturell und mechanisch selbsttragend.Der Rotor ist an beiden Enden durch Endkappen im Stator aufgehängt.Alle anzuschließenden Peripheriegeräte werden in der Regel an den Endkappen verschraubt, die leicht bis zu 50 % der Gesamtlänge des Motors einnehmen.Rahmenlose Motoren reduzieren Verschwendung und Redundanz, da keine zusätzlichen Montagehalterungen, Platten oder Halterungen erforderlich sind und alle konstruktionsbedingt erforderlichen strukturellen und mechanischen Halterungen direkt in den Motor integriert werden können.Dies hat den Vorteil, dass Stator und Rotor nahtlos in das System integriert werden können, wodurch die Größe reduziert wird, ohne dass die Leistung darunter leidet.
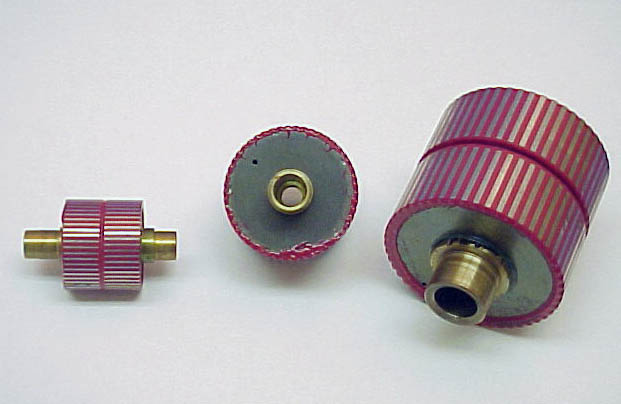
Die Miniaturisierung von Schrittmotoren ist eine Herausforderung.Die Leistung eines Motors hängt direkt von seiner Größe ab.Mit abnehmender Rahmengröße nimmt auch der Platz für die Rotormagnete und -wicklungen zu, was sich nicht nur auf das maximal verfügbare Drehmoment, sondern auch auf die Laufgeschwindigkeit des Motors auswirkt.Die meisten Versuche, einen Hybrid-Schrittmotor der Größe NEMA6 herzustellen, scheiterten in der Vergangenheit. Dies zeigt, dass die Baugröße des NEMA6 zu klein ist, um eine brauchbare Leistung zu erbringen.Durch den Einsatz von Erfahrung im kundenspezifischen Design und Fachwissen in mehreren Disziplinen konnte die Automobilindustrie erfolgreich eine Hybrid-Schrittmotortechnologie entwickeln, die in anderen Bereichen gescheitert ist.verfügbares dynamisches Drehmoment, bietet aber auch ein hohes Maß an Präzision. Ein typischer Permanentmagnetmotor hat 20 Schritte pro Umdrehung oder einen Schrittwinkel von 18 Grad und kann mit einem 3,46-Grad-Motor eine 5,7-fache Auflösung liefern.Diese höhere Auflösung führt direkt zu einer höheren Genauigkeit und bietet einen Hybrid-Schrittmotor.In Kombination mit dieser Schrittwinkeländerung und dem Rotordesign mit geringer Trägheit ist der Motor in der Lage, mehr als 28 Gramm dynamisches Drehmoment bei Drehzahlen von annähernd 8.000 U/min zu erreichen, was eine ähnliche Drehzahlleistung wie ein standardmäßiger bürstenloser Gleichstrommotor liefert.Durch die Erhöhung des Schrittwinkels von typischen 1,8 Grad auf 3,46 Grad können sie nahezu das Doppelte des Haltemoments der nächstkonkurrierenden Designs erreichen, und mit bis zu 56 g/Zoll ist das Haltemoment nahezu gleich groß (bis zu 14 g/Zoll). im) viermal so hoch wie bei herkömmlichen Permanentmagnet-Schrittmotoren.
Mikroschrittmotoren können in einer Vielzahl von Branchen eingesetzt werden, die eine kompakte Struktur bei gleichzeitig hoher Präzision erfordern, insbesondere in der medizinischen Industrie, von der Notaufnahme über das Patientenbett bis hin zu Laborgeräten. Mikroschrittmotoren sind kostengünstiger.hoch.Das Interesse an Handpipetten ist derzeit groß.Mikroschrittmotoren bieten die hohe Auflösung, die für die präzise Dosierung von Chemikalien erforderlich ist.Diese Motoren bieten ein höheres Drehmoment und eine höhere Qualität.Für das Labor wird der winzige Schrittmotor zum Maßstab für Qualität.Die kompakte Größe macht den Miniatur-Schrittmotor zur perfekten Lösung, egal ob es sich um einen Roboterarm oder einen einfachen XYZ-Tisch handelt, Schrittmotoren sind einfach anzuschließen und können Open-Loop- oder Closed-Loop-Funktionalität bieten.
Zeitpunkt der Veröffentlichung: 05.08.2022