Während des Betriebs des Motors, in EchtzeitÜberwachungvon Parametern wie Strom, Geschwindigkeit und der relativen Position der rotierenden Welle in Umfangsrichtung, um den Status des Motorkörpers und der angetriebenen Ausrüstung zu bestimmen und den Betriebsstatus des Motors und der Ausrüstung in Echtzeit weiter zu steuern, um Servo, Geschwindigkeitsregelung usw. zu realisieren. Viele spezifische Funktionen.Hier mit dem Encoderda das Front-End-Messelement nicht nur das Messsystem erheblich vereinfacht, sondern auch präzise, zuverlässig und leistungsstark ist.

Der Encoder ist ein Drehsensor, der die Position und Verschiebung der rotierenden Teile in eine Reihe digitaler Impulssignale umwandelt.Diese Impulssignale werden vom Steuersystem erfasst und verarbeitet und es werden eine Reihe von Anweisungen ausgegeben, um den Betriebszustand der Ausrüstung anzupassen und zu ändern.Wenn der Encoder mit einer Zahnstange oder einer Spindel kombiniert wird, kann er auch zur Messung der Position und Verschiebung linear bewegter Teile verwendet werden.
Encoder werden in Motorausgangssignal-Rückkopplungssystemen sowie in Mess- und Steuergeräten verwendet.Der Encoder besteht aus zwei Teilen: der optischen Codescheibe und dem Empfänger.Die durch die Drehung der optischen Codescheibe erzeugten optischen variablen Parameter werden in entsprechende elektrische Parameter umgewandelt, und die Signale, die die Leistungsgeräte antreiben, werden über den Vorverstärker und das Signalverarbeitungssystem im Wechselrichter ausgegeben..
Im Allgemeinen kann der Drehgeber nur ein Geschwindigkeitssignal zurückmelden, das mit dem eingestellten Wert verglichen und an die Ausführungseinheit des Wechselrichters zurückgeführt wird, um die Motorgeschwindigkeit anzupassen.
Nach dem Detektionsprinzip kann der Encoder in optisch, magnetisch, induktiv und kapazitiv unterteilt werden.Je nach Skalierungsmethode und Signalausgabeform kann es in drei Typen unterteilt werden: inkremental, absolut und hybrid.
Inkrementalgeber, seine Position wird durch die Anzahl der ab der Nullmarke gezählten Impulse bestimmt;Es wandelt die Verschiebung in ein periodisches elektrisches Signal um und wandelt das elektrische Signal dann in einen Zählimpuls um. Die Anzahl der Impulse stellt die Verschiebung dar.absolut Die Position des Typs Encoder wird durch das Lesen des Ausgabecodes bestimmt.Die Ausgabecodelesung jeder Position innerhalb eines Kreises ist eindeutig und die Eins-zu-eins-Entsprechung mit der tatsächlichen Position geht nicht verloren, wenn die Stromversorgung unterbrochen wird.Daher ist der Positionswert aktuell, wenn der Inkrementalgeber aus- und wieder eingeschaltet wird;Jede Position des Absolutwertgebers entspricht einem bestimmten digitalen Code, daher bezieht sich der angezeigte Wert nur auf die Start- und Endposition der Messung, während er nichts mit dem Zwischenprozess der Messung zu tun hat.

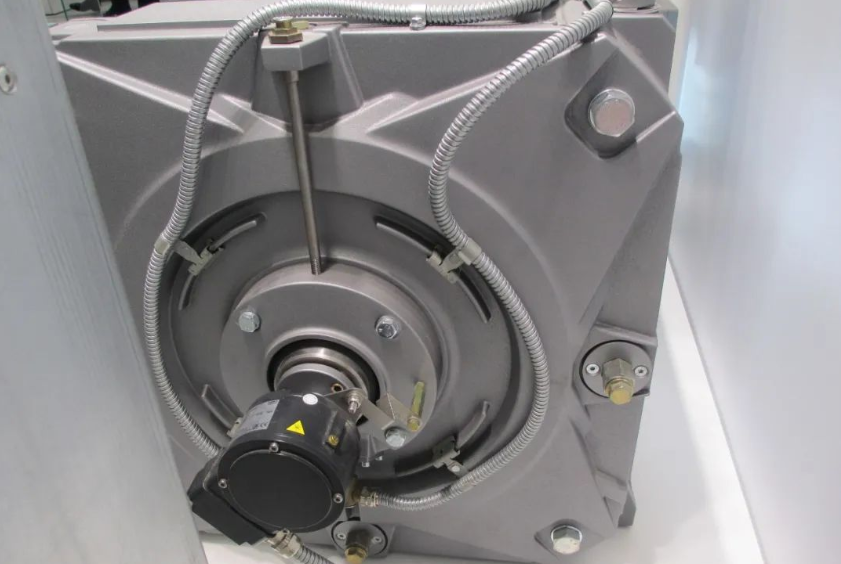
Der Encoder ist als Informationserfassungselement über den Motorlaufzustand durch mechanische Installation mit dem Motor verbunden.In den meisten Fällen müssen dem Motor ein Encodersockel und eine Anschlusswelle hinzugefügt werden.Um die Wirksamkeit und Sicherheit des Motorbetriebs und des Erfassungssystembetriebs zu gewährleisten, ist die Koaxialitätsanforderung der Encoder-Endverbindungswelle und der Hauptwelle der Schlüssel zum Herstellungsprozess.
Zeitpunkt der Veröffentlichung: 20.07.2022